The download server is currently under maintanance. Please check back later. Thank you for your patience!
News
- April 30, 2025: Released undistorted DSLR images, 3DGS example codebase, and semantics baselines.
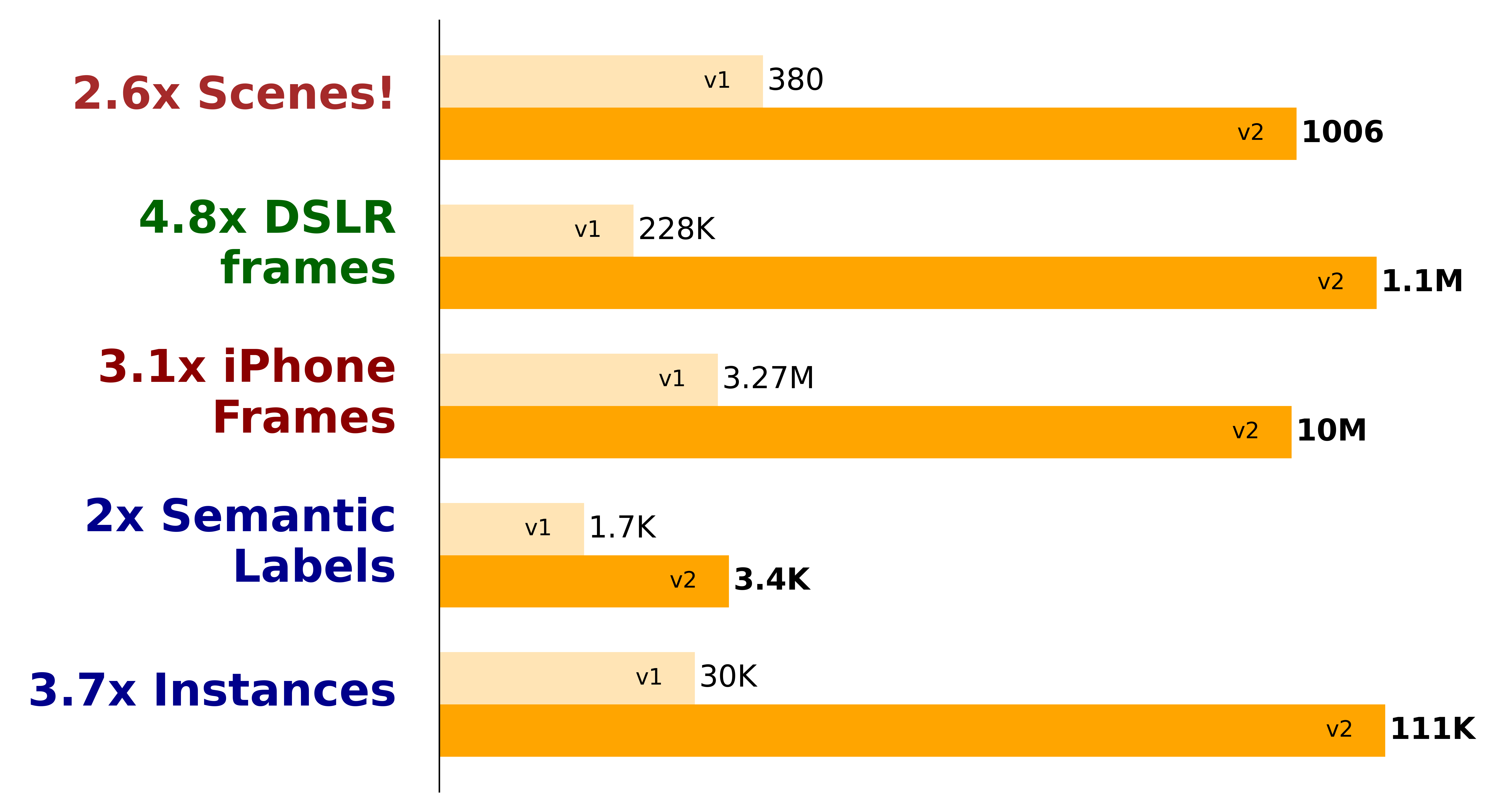
- December 20, 2024: ScanNet++ v2 released with 🔥1000+ scenes🔥, more scene types, updated annotations and poses. Check out the Changelog for details
- November 2023: Version 1 of the dataset and NVS and semantic benchmarks released, several updates to the dataset.
- October 2023: A ready-to-run dataparser for ScanNet++ is in Nerfstudio now.
- September 2023: ScanNet++ website is up! Apply for access to download the data now.
Download the data
To download the data, please create an account, login and create an
application.
Once your application is approved, you will receive a personalized token to download the data
along with further instructions.
Introduction
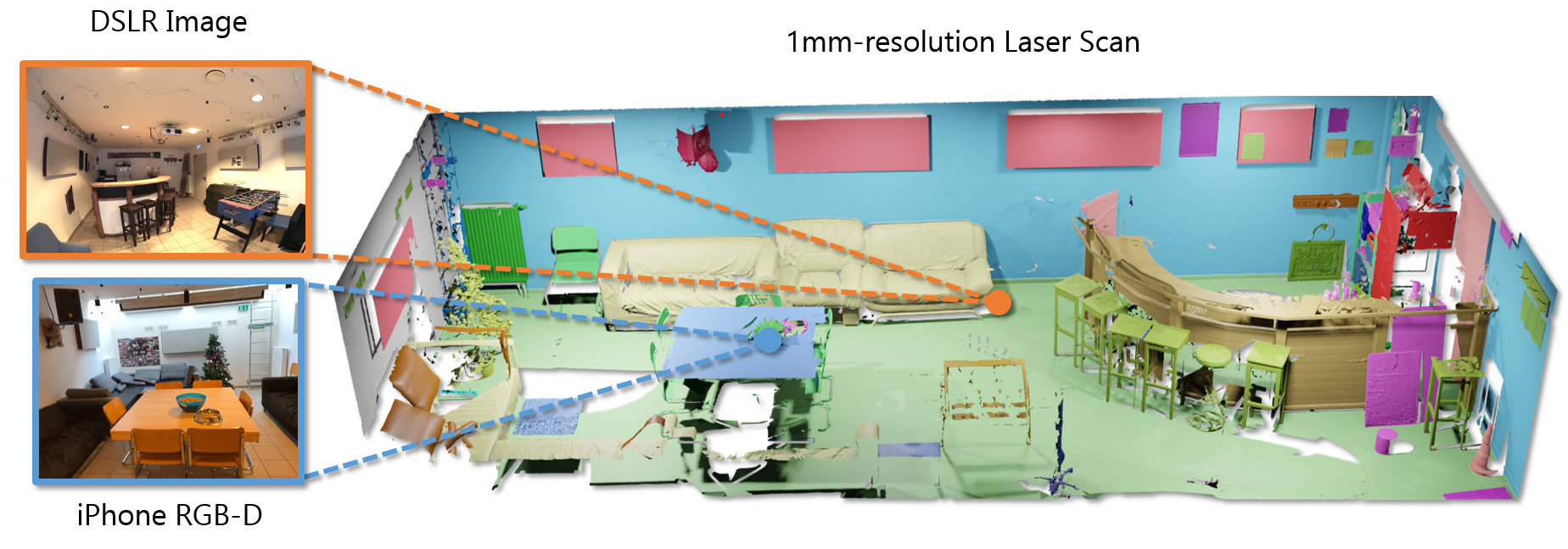
ScanNet++ is a large scale dataset with 1000+ 3D indoor scenes containing
sub-millimeter resolution laser scans, registered 33-megapixel DSLR images,
and commodity RGB-D streams from iPhone. The 3D reconstructions are annotated
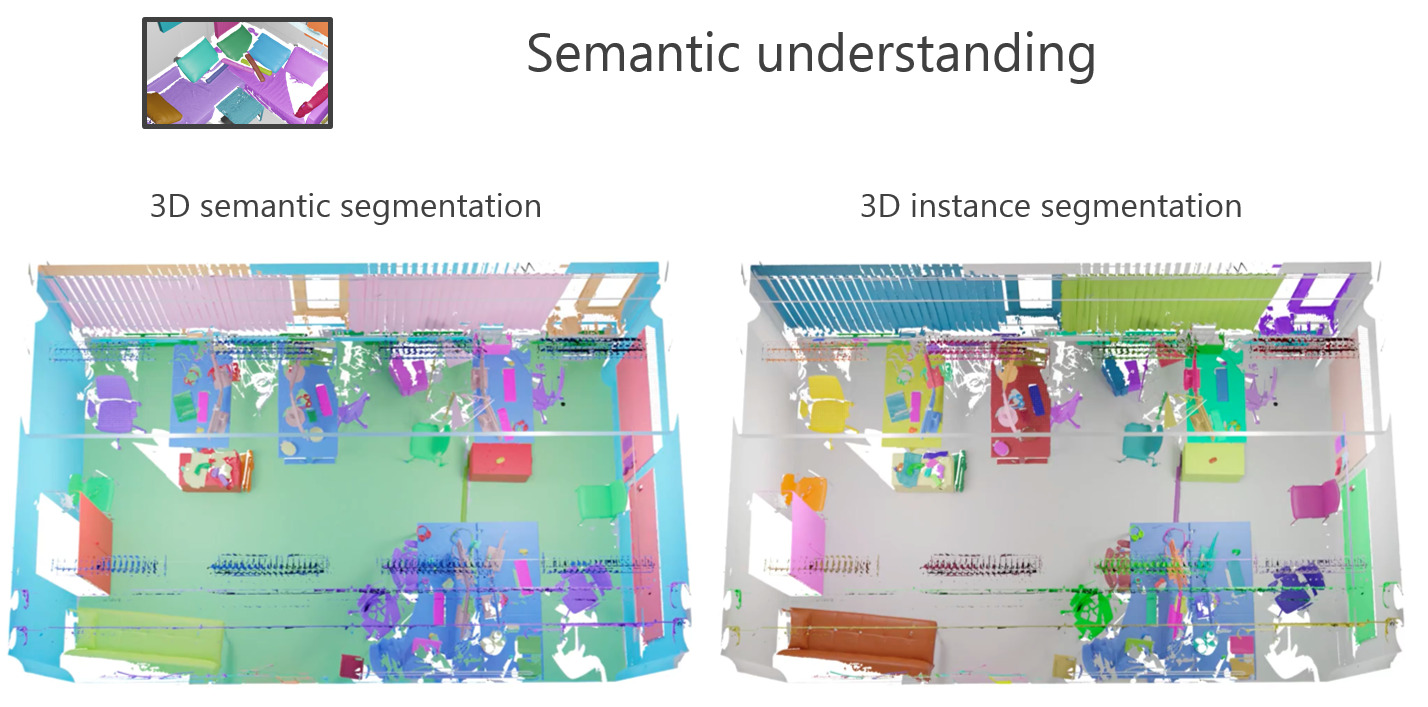
with long-tail and label-ambiguous semantics to benchmark semantic understanding methods,
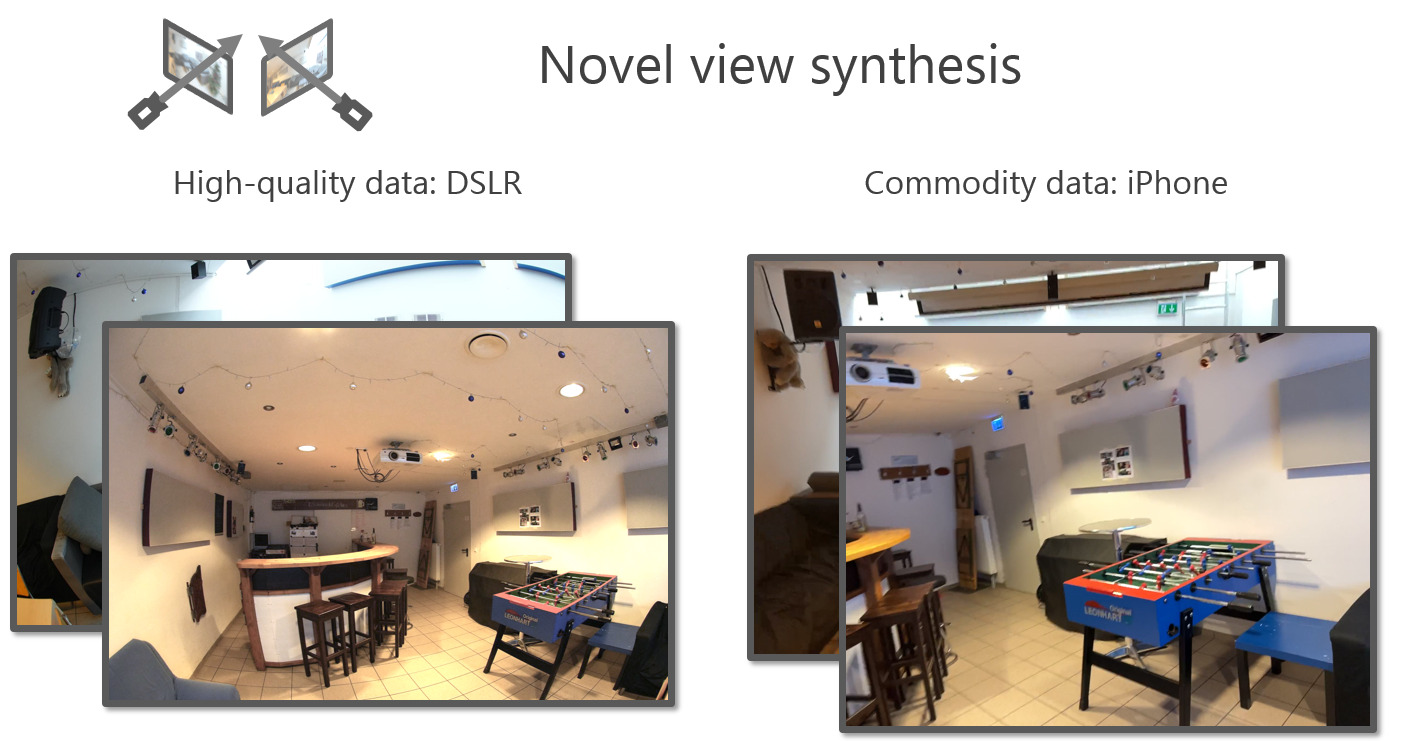
while the coupled DSLR and iPhone captures enable benchmarking of novel view synthesis methods
in high-quality and commodity settings.
Benchmarks
Citation
If you use the ScanNet++ data or code please cite:
@inproceedings{yeshwanthliu2023scannetpp,
title={ScanNet++: A High-Fidelity Dataset of 3D Indoor Scenes},
author={Yeshwanth, Chandan and Liu, Yueh-Cheng and Nie{\ss}ner, Matthias and Dai, Angela},
booktitle = {Proceedings of the International Conference on Computer Vision ({ICCV})},
year={2023}
}License
The ScanNet++ data is released under the
ScanNet++ Terms of Use, which you can agree to after signing up.
Privacy
We take privacy very seriously.
We have taken great care to ensure that the data is anonymized and does not contain any personally identifiable
information.
If you notice any privacy concerns, please contact us.